



L'étalonnage et ses raisons d'être
La boîte à outils WaveMe dispose d'une méthode d'étalonnage assez exceptionnelle qui permet une utilisation beaucoup plus souple du capteur de front d'onde Shack-Hartmann. Cette présentation technique traitera de ce qu'est cette méthode et des raisons pour lesquelles elle est différente de ce qui est disponible ailleurs. Nous partons du principe que le lecteur connaît déjà les principes du capteur de front d'onde Shack-Hartmann. Cependant, la plupart des explications que l'on peut trouver sur Internet ne fournissent pas de chiffres, j'espère que nous pourrons adopter un point de vue différent ici.
Un exemple numérique simple
Commençons par la précision de placement typique d'un réseau de micro-lentilles, qui est d'environ 250 nanomètres. Pour simplifier, supposons que toutes les lentilles mirco ont la même erreur de placement, y compris la direction. Cet exemple est un peu ridicule, car nous n'avons déplacé l'ensemble du réseau que de 250 nm. Il nous aide cependant à relier certains des paramètres de configuration d'un capteur au front d'onde intégré. Si nous supposons également que la distance entre la matrice et le capteur est la même que la taille de l'ouverture, après intégration de cette erreur de déplacement, nous aurons une erreur de front d'onde de 250 nm. Si seulement la moitié des micro-lentilles du réseau sont déplacées de cette valeur, l'erreur de front d'onde sera réduite de moitié. Toutefois, ce chiffre reste très élevé par rapport à la précision que nous recherchons.
Mais pour les capteurs Hartmann, nous devons faire la distinction entre les erreurs aléatoires et systématiques. Un déplacement systématique de 250 nm, bien que ce ne soit pas ainsi que nous l'interpréterions, deviendra une erreur de front d'onde de 250 nm (selon les hypothèses de notre modèle actuel). Si, au contraire, nous avons une erreur de front d'onde de 250 nm aléatoire L'erreur devient alors 250nm divisé par la racine carrée du nombre de spots. Il s'agit souvent d'un bon chiffre. Le but de cet exercice est de souligner l'importance du contrôle des erreurs systématiques lors des mesures de front d'onde avec un capteur Shack-Hartmann.
Belles positions
Si 250 nanomètres semblent beaucoup, même un réseau de capteurs méga-pixels aura une taille de pixel de plusieurs micromètres, voire de plus de 10 micromètres. Il est clair qu'un capteur de front d'onde précis doit trouver le centre de distribution de la lumière avec une certaine précision.
Il existe plusieurs façons de procéder, mais une méthode assez courante consiste à utiliser le centroïde, qui additionne l'intensité échantillonnée d'un pixel de la caméra multipliée par la coordonnée du pixel et divisée par la somme des intensités échantillonnées des pixels. Si nos taches sont grandes, ce qui signifie que l'intensité varie lentement sur la taille d'un pixel, cette méthode est tout à fait satisfaisante. Cependant, pour les petites taches, l'algorithme du centroïde produit une erreur importante d'apparence aléatoire.
Un point mérite d'être souligné. Lorsque nous nous concentrons sur les erreurs de front d'onde de bas niveau, telles que la coma ou l'astigmatisme - ce que nous faisons souvent - le bruit numérique dans la position du centroïde a généralement peu d'impact, et les résultats restent très bons. Cela est dû au fait que l'erreur systématique reste relativement faible. Un autre point important concernant l'étalonnage des capteurs Shack-Hartmann est que nous devons maintenir les erreurs systématiques à un niveau extrêmement faible, correspondant au niveau de précision que nous souhaitons atteindre.
Positions précises à l'aide de modèles
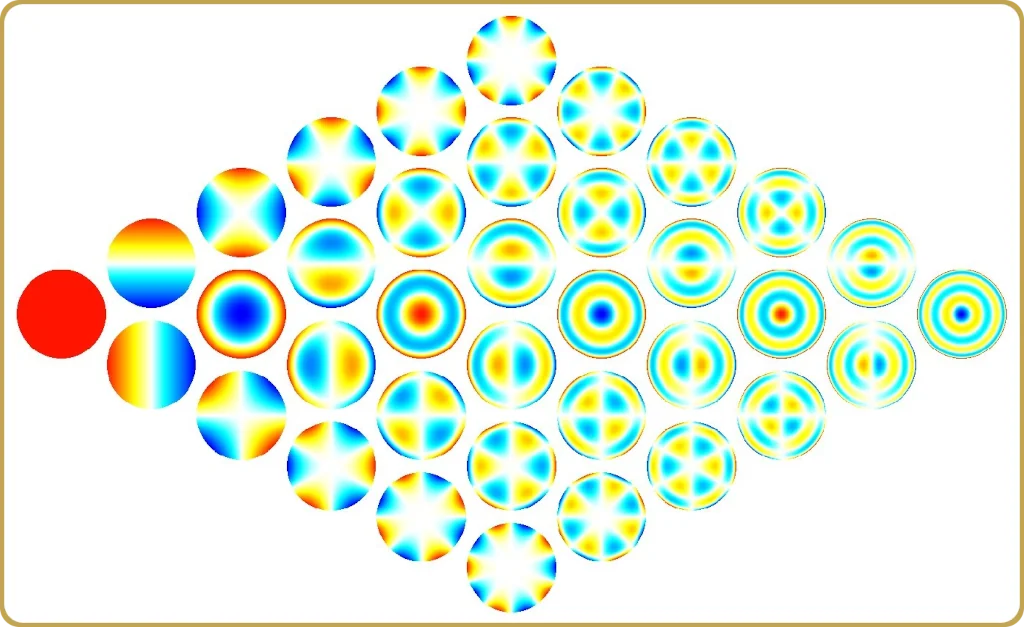
Le module Shack-Harmann de WaveMe ne calcule pas les centroïdes. Au lieu de cela, nous utilisons la méthode du "modèle" afin de pouvoir analyser de nombreux spots avec des résolutions de caméra modérées. La méthode du modèle exige que nous déterminions quel spot modèle correspond le mieux aux données actuelles. À l'aide d'une tache modèle, le programme produit un ensemble de modèles correspondant à différentes positions de la tache au sein d'un pixel et de ses voisins. Puis, de manière un peu simplifiée, WaveMe établit une corrélation entre les données actuelles et ce modèle. L'application cible de WaveMe étant le travail d'alignement quotidien, le capteur devra gérer à la fois les faisceaux collimatés et les faisceaux divergents. Pour cette raison, WaveMe optimise le modèle dans un fil de discussion en arrière-plan. Mais l'histoire ne s'arrête pas là ; en fait, elle ne fait que commencer.
Méthodes d'étalonnage
Il existe de nombreuses façons de calibrer un capteur Shack-Hartmann. La meilleure dépend de l'utilisation que l'on veut en faire. Si le capteur est installé de manière fixe et éclairé par un faisceau collimaté, un étalonnage différentiel peut suffire amplement. Lorsque le front d'onde mesuré est moins prévisible, il convient de reconsidérer cette approche.
Étalonnage différentiel
Lorsqu'il s'agit de choisir des méthodes d'étalonnage, nous pouvons les diviser en deux : différentielle et absolue. Lorsque nous utilisons la méthode différentielle, nous stockons les centres des points comme référence et présentons l'"erreur" du front d'onde et l'écart intégré par rapport à cette référence. Si la référence a été prise avec un front d'onde plan, notre résultat est le front d'onde réel qui illumine le réseau de micro-lentilles. Toutefois, si nous mesurons un front d'onde divergent, plusieurs autres contributions d'erreurs systématiques apparaîtront, qui peuvent facilement dominer toutes les autres sources d'erreur. Nous approfondirons ce sujet ultérieurement.
Calibrage absolu
Une autre approche d'étalonnage, que nous pouvons qualifier d'étalonnage absolu, utilise des fronts d'onde sphériques, capturés à différentes distances de la source de référence. Cet ensemble de données de base peut ensuite être (par exemple) interpolé lors de la génération d'une référence pour la position actuelle de la source. Ici, nous pouvons immédiatement tirer la conclusion que l'application courante de ces données sera une sorte d'extrapolation et que notre modèle devrait donc être un polynôme d'ordre inférieur. L'avantage de cette méthode est que les fronts d'onde sphériques sont disponibles à un niveau de qualité très élevé. Les fibres monomodes ou les trous d'épingle appropriés fourniront des fronts d'onde sphériques de très haute qualité. Ce qu'ils ne fournissent pas, ce sont des fronts d'onde convergents, ce qui signifie que lorsque nous utilisons cette méthode avec des fronts d'onde convergents, la quantité d'extrapolation peut être importante. Pour les capteurs Shack-Hartmann, il y a des limites au front d'onde convergent que l'on peut mesurer de toute façon, mais cela limite tout de même la plage utile.
WaveMe - Étalonnage de référence synthétique
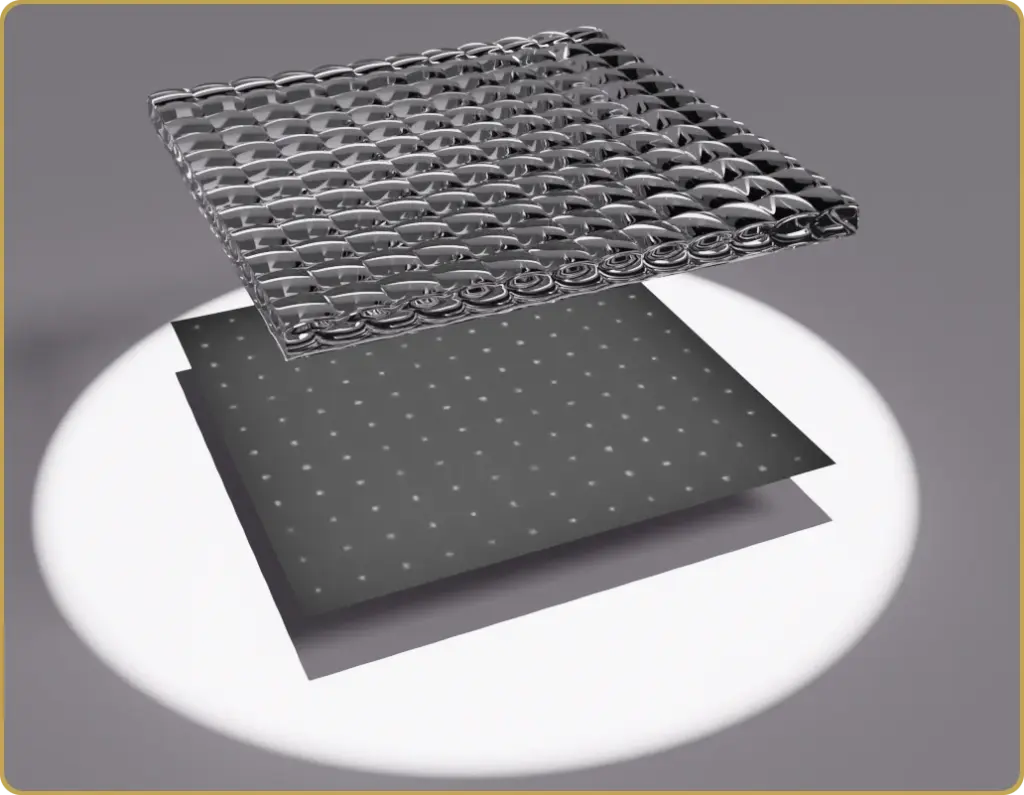
WaveMe utilise une approche totalement différente, où les centres optiques des micro-lentilles sont extraits des informations d'étalonnage, en 3D, et un modèle optique physique est mis en œuvre pour tenir compte des effets du nombre de Fresnel limité. La seule hypothèse est que le réseau est plat, mais au-delà, il peut être placé avec des tolérances mécaniques. Aucun alignement du réseau n'est nécessaire.
L'exigence d'alignement plus souple du réseau de micro-lentilles peut être un avantage considérable, car même les petites vis différentielles peuvent avoir un diamètre de plusieurs millimètres et une longueur de plus d'un centimètre. Cela empêche toute intégration rentable des capteurs et des réseaux de lentilles en une seule unité. Cela permet d'obtenir des solutions extrêmement compactes tout en restant très précises.
Génération et optimisation continues de références
WaveMe suppose que la caméra transmet en permanence des images. Ces informations sont analysées par un thread indépendant pour extraire la position de la source et, à l'aide de ces informations, le module Shack-Hartmann crée ses propres données de référence sur la position du point sur la base du modèle optique physique et d'une source ponctuelle idéale virtuelle qui peut maintenant se trouver à n'importe quelle position, générant des fronts d'onde de référence (virtuels) divergents, collimatés ou convergents. Les sources virtuelles peuvent également avoir n'importe quel angle d'incidence.
Cette méthode pourrait être considérée comme un étalonnage absolu, mais il est plus descriptif de la considérer comme un étalonnage de source virtuelle. L'étalonnage absolu susmentionné utilise des résultats interpolés ou extrapolés à partir d'un plus grand nombre de mesures explicites de la position de la tache, tandis que la seconde méthode déduit un ensemble unique de centres optiques pour les microlentilles à partir d'un plus grand nombre de mesures. La différence peut sembler subtile, mais elle ne l'est pas. WaveMe déduit les positions des microlentilles et un modèle optique physique qui explique toutes les données qui lui sont fournies au cours du processus d'étalonnage. En termes relatifs, la difficulté est déplacée vers le processus d'étalonnage tandis que l'application du modèle est, au moins numériquement parlant, relativement simple et couvre intrinsèquement tous les cas d'application. Il s'agit d'un choix qui correspond mieux à l'application cible où aucune hypothèse d'alignement du front d'onde incident ne peut être attendue.
Technologie habilitante
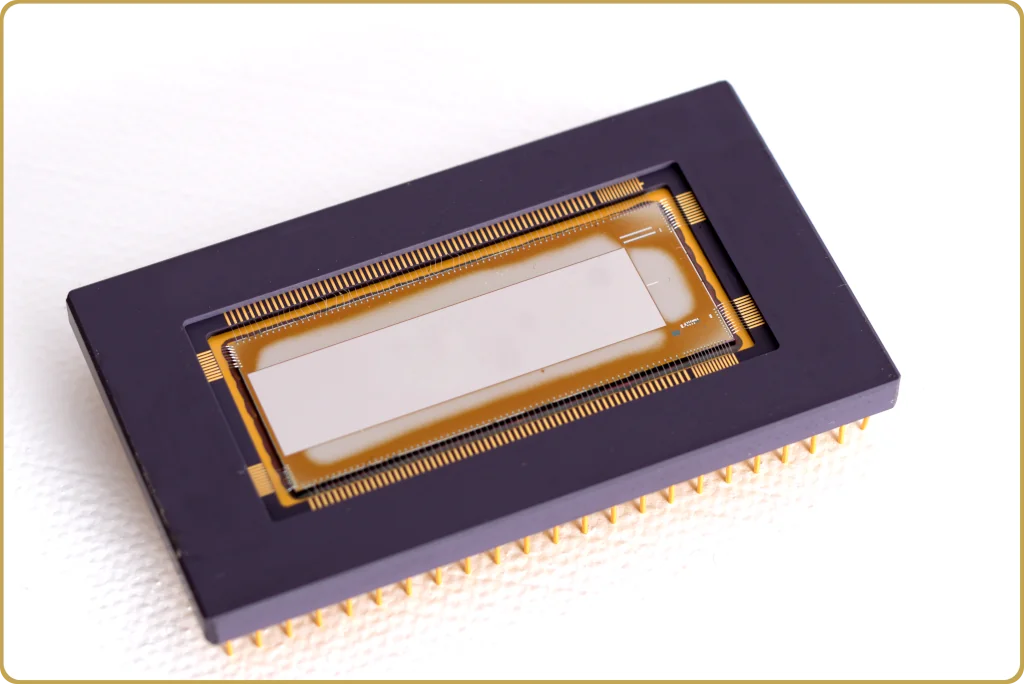
L'un des avantages de l'étalonnage par référence synthétique est qu'il permet de réaliser des applications pour lesquelles il n'y a pas de place pour une monture cinématique ou des ajustements mécaniques. Par exemple, il est possible de placer un réseau de micro-lentilles sur un circuit imprimé au-dessus d'un capteur CMOS à l'aide d'une machine pick-and-place. Le résultat est un capteur Shack-Hartmann compact et robuste à un prix inégalé, les mathématiques prenant en charge les effets d'étalonnage dus au désalignement.
Bien que cette solution spécifique ne fasse pas partie des priorités actuelles de Sensolgic, nous explorons activement d'autres applications de cette technologie. Si la solution de caméra intégrée vous intéresse, n'hésitez pas à nous contacter. Il y a de nombreux aspects de la technologie que Senslogic n'a pas les ressources pour explorer pour le moment, mais nous sommes ouverts à une coopération.
Comparaison avec d'autres applications
En naviguant sur Internet pour découvrir les techniques d'étalonnage et de mesure de Shack-Hartmann, vous rencontrerez le concept de zone d'intérêt (AOI) ou de région d'intérêt (ROI), qui définit un ensemble de parcelles carrées grossièrement alignées sur les centres des positions des taches. Nous n'utilisons pas ces concepts dans WaveMe. Bien qu'ils puissent fonctionner dans une application statique, le cas d'utilisation dynamique de WaveMe ne le permet pas du tout.
WaveMe repose sur l'hypothèse d'un flux d'images. Lorsque le module Shack-Hartmann est activé, il tente d'identifier l'existence d'un motif de taches. Ce motif peut avoir n'importe quelle rotation et la gamme d'espacements acceptés pour les taches est plus large que la plupart des conditions pratiques de détection du front d'onde. Une fois qu'un modèle de tache est identifié, les taches sont énumérées et un processus d'adaptation d'un modèle de tache aux données actuelles est lancé dans un thread indépendant. Une fois les taches énumérées, les images suivantes sont traitées à l'aide du suivi des taches.
Comme il n'y a pas d'espace fixe dans lequel le motif des taches doit s'inscrire, il n'y a pas de plage dynamique explicite pour le capteur. Il y en a cependant une, dans le sens où lorsque le capteur est déplacé trop près de la source, la taille relative des taches change trop et la précision se dégrade quelque peu.
Une autre raison pour laquelle WaveMe n'utilise pas de grille fixe pour localiser le motif du spot est que la position de la source n'est pas supposée connue. Le front d'onde peut éclairer le capteur à partir d'un large éventail de directions et de distances. Des zones d'intérêt fixes constitueraient une limitation trop importante et l'obligation de les adapter aux positions actuelles des points n'est pas acceptable pour l'utilisation d'un capteur destiné à l'alignement optique interactif, qui est l'application cible de ce module et de WaveMe en général. Après tout, il est censé être "point-and-shoot".
Laisser un commentaire